Current
Current is the flow of electrical charge carriers like electrons.
Current flows from negative to positive points.
The SI unit for measuring electric current is the ampere (A).
One ampere of current is defined as one coulomb of electrical charge moving past a unique point in a second. Electric current is widely used in household and industrial appliances
I = Q/t
Voltage is the pressure from an electrical circuit's power source that pushes charged electrons (current) through a conducting loop, enabling them to do work such as illuminating a light.
Resistivity
Resistivity is directly proportional to length of conductor.
Resistivity is inversely proportional to cross sectional area of conductor.
R ∝ L
R ∝ 1/A
ஃ R ∝ L/A
ஃ R = ⍴ L/A
⍴ = resistivity of conductive material
⍴ = R A / L
Unit = Ω . m
Alloys have more conductivity and less resistivity.
Insulators have high resistivity and less conductivity
Resistors behavior in series and parallel
Series
If we have 3 resistivity materials and connected in series then total voltage drop is equal to sum of individual.
V = V1 + V2 + V3
As per ohm's law ( V= IR )
IR = IR1 + IR2 + IR3
so, R = R1 + R2 + R3
Parallel
I = I1 + I2 + I3
As per ohm's law ( V= IR )
V/R = V/R1 + V/R2 + V/R3
1/R = 1/R1 + 1/R2 + 1/R3
Power
Power is defined as work done per unit time
P = Electrical energy consumed / Time
= W/t

kWH
kWH means Kilo Watt hour
[ads id="ads1"]
kVA
kVA means Kilo Volt-Amps
kVA = Volts x Amps / 1000
Example: Equipment using Current = 2.5 A; Voltage = 120 Volt; Frequency = 50 Hz
kVA = 120 x 2.5 / 1000 = 0.3 kVA
[ads id="ads1"]
kW and kVA
Difference between kW and kVA is power factor. Power factor is generally given by equipment supplier.
Power factor = 0.95 then kVA x 0.95 = kW.
*Conversion from kWH to kVA. These are two different measures. kWH is energy and kVA is power . kW (power) and kVA (power) related by power factor.
Frequency is the number of times a sine wave repeats, or completes, a positive-to-negative cycle.
Our house hold power has rating 50 A current, 230 V Voltage, 50 Hz Frequency. 50 Hz means 50 AC Wave cycle in 1 second.
Electrical resistance of an electrical conductor depends on
- The length of the conductor
- The material of the conductor
- The temperature of the material
- The cross-sectional area of the conductor
and can be expressed as
R = ρ L / A (1)
where
R = resistance of the conductor (ohms, Ω)
ρ = resistivity of the conductor material (ohm metre, Ω m)
L = length of conductor (m)
A = cross-sectional area of conductor (m2)
Resistivity of some Common Conductors
Aluminum: 2.65 x 10-8 Ω m (0.0265 μΩ m)
Carbon: 10 x 10-8 Ω m (0.10 μΩ m)
Copper: 1.724 x 10-8 Ω m (0.0174 μΩ m)
Iron: 10 x 10-8 Ω m (0.1 μΩ m)
Silver: 1.6 x 10-8 Ω m (0.0265 μΩ m)
Note that resistivity depends on temperature. The values above are for temperatures 20 oC.
Resistivity, Conductivity and Temperature Coefficients for some Common Materials
Resistivity of some Common Insulators
bakelite: 1 x 1012 Ω m
glass: 1 x 1010 - 1 x 1011 Ω m
marble: 1 x 108 Ω m
mica: 0.9 x 1013 Ω m
paraffin oil: 1 x 1016 Ω m
paraffin wax (pure): 1 x 1016 Ω m
plexiglass: 1 x 1013 Ω m
polystyrene: 1 x 1014 Ω m
porcelain: 1 x 1012 Ω m
pressed amber: 1 x 1016 Ω m
vulcanite: 1 x 1014 Ω m
water, distilled: 1 x 1010 Ω m
Note that good conductors of electricity have low resistivity and good insulators have high resistivity.
Example - Resistance of a Conductor
The resistance of 10 meter gauge 17 copper wire with cross sectional area 1.04 mm2 can be calculated as
R = (1.7 x 10-8 Ω m) (10 m) / ((1.04 mm2)(10-6 m2/mm2))
= 0.16 Ω
Example - Cross-sectional area and Resistance
The copper wire above is reduced to gauge 24 and cross-sectional area 0.205 mm2. The increase in resistance can be calculated to
R = (1.7 x 10-8 Ω m) (10 m) / ((0.205 mm2)(10-6 m2/mm2))
= 0.83 Ω
Electric motor

Chemical companies have mostly rotary equipments have motor. In this blog we will learn about motors in easy terms.
Basic concepts
- Motors convert electrical energy in mechanical rotation.
- Motor is creating magnetic field between rotor & stator wire winding which result in rotation
- Basic components of motor
2. Rotor - Stem side winding
3. Bearing
4. Frame [ enclosure - In which motor is fitted ]
- Motor types -
2. Direct current
3. synchronous motor

Motor types
1. Induction motor
Winding in motor of rotor and stator is in opposite direction. current is in opposite direction magnetic field is generated and this is make motor rotate.
Commonly used motor in chemical industry in pumps, blowers, fans, conveyers.
2. Direct current motors
This motor is using unidirectional current. This motor is used in high torque starting and smooth operation on high operation.3. Synchronous motor
There are two types of current AC & DC [ AC - Alternate current; DC - Direct current current ].In this type of motor both type current is used. AC power is used by Stator & DC Power is used by Rotor.
DC power is single direction power which produces constant magnetic field. This gives constant thrust to rotor.
AC power is producing heat due to its magnetic amplitude is changing . This heat can be removed by fins on motor. AC power is also have much energy losses.
Motor Characteristics
Motor speedMotor speed or RPM is depends on 1. Frequency, 2. Number of poles on rotor.
 |
Poles = 2, 4, 6, 8, 10, 12, 16 etc
Actual speed is less than theoretical speed is called Slip(%)

Motor efficiency is defined as ratio of Mechanical energy delivered to Electrical energy input.
Motor efficiency is also depend n motor temperature. Totally closed and fan cooled motors are high efficient motors.
Losses in motors are
1. Fixed losses - Magnetic core loss, Friction loss ( 8 - 12 % of total losses)
2. Variable losses - Resistance losses between Rotor & Stator(I2R), Stray load losses
Efficiency improvement scopes
|
|
Stator (I2R)
|
Use more copper
Large conductor
Increase cross section area windings
|
Rotor (I2R)
|
Use large conductor bars
Increase size of cross section
|
Friction and windage losses
|
Use of low loss fan design to reduce air movement loss
|
Stray load loss
|
Optimized deigned motor use
Strict quality control while production in motor
|
[ads id="ads1"]
- Electric hazard to human is due to Current not Voltage
- Human body's blood is good conductor of current but skin is resistor at 10 mA range
- Electrical shock to person refers to the current flowing through nerves, muscles and body organs.
- Current produce heating in body and body parts got burns due to this.
- AC current is more dangerous than DC current. AC current fibrillate at each cycle but DC does it once.
 |
| Hazards of Electricity |
2. Factors governing electrical hazards
There are some factors which effect the injury to the person experiencing electrical shockA. Amplitude of current
B. Duration of current
C. Condition of the body
D. Age & Sex
E. Temperature & Humidity.
F. Oxygen & Carbon dioxide content.
G. Material & flooring
H. Position of Hands and Legs.
I. Condition of earthing.
- Upto 1 mA - No sensation
- 1 to 8 mA - Sensation without pain
- 8 to 15 mA - Painful shock.
- 15 to 20 mA - Muscular control loss, Result in sticking
- 20 to 50 mA - Severe muscular contraction
- 50 to 250 mA - Muscle damage [Ventricular fibrillation], Possible death
- 250 mA and above - Severe burns, severe ventricular fibrillation, Resulting in death for long shocks.
- 4A - Heart paralysis, Heart stops for duration of current passage for short shocks, For short shocks heart may re start on interruption of current
- 5A - Tissue burning.
- Duration of current and its amplitude both are inter related in deciding the injury.
- If current passes for longer time, body will absorb more energy and injury will be more.
- 10 mA current can flow for 5 seconds through body without any danger. While 5 A current for 1 Second could be result in fatal.
- Resistance by
Wet skin - 1 thousand ohm
- This is the reason wet skin conduct electricity faster and high risk of electric shock.
Current flowing through body can be calculated by Ohm's law
Current = [Voltage/ resistance of body] + resistance of flooring
D. Age & Sex
- Electricity resistance - Men > Women > Children
E. Temperature & Humidity.
- Higher Temperature and Humidity generates more sweat.
- Sweaty skin increase conductivity of electricity.
F. Oxygen & Carbon dioxide content.
- When person breath Carbon dioxide more his resistance to electricity.
- When welder doing his job He has more risk of electric shock.
G. Material & flooring
- Person standing on dry wooden block has less possibility of shock.
- Electric shock possible areas - Bathrooms, Checker plate, Steel platform, Wet soil
H. Position of Hands and Legs
- Position of body decides how current flows inside body.
- When hand and legs position is that type where heart is in center is most dangerous.
I. Condition of earthing
- Good and continue earthing has less possibility of accident.
3. Factors leading to electrical shock
- Lack of knowledge, Overconfidence, wrong practice, Miscommunication.
- Wrong risk taking, Working without Proper PPEs, Bypass Safety system or SOP
- Jobs in hurry, working without concentration
- Poor maintenance system, Equipment, Quality of tools. Temporary repairs, Poor earthing.
4. How to avoid electrical accidents?
- Always wear rubber gloves and safety shoes with rubber soles It has resistance up to 20 Mega Ohms
- Whenever any job taken Lockout must me done on paper duly signed.
- Never bypass interlock without study and circulating information among all departments.
- Grounding must be provided at 2 points.
- Measuring instrument must be calibrated.
- Earthing, Double Earthing and General earthing according to power station size.
- Use of Switches, rubber mates, Wooden flooring, Wooden ladders and scaffolds, Fuse puller, Safety shoes with rubber soles.
- Use Insulated cables
- Earthing monitoring system
- Emergency tripping switch
- Earth leakage circuit breaker system installation
- Replace damaged cables, improper plugs, loose connection,
- Always use 3 pin plug.
- Don't use multiple sockets in one socket.
- Avoid temporary lighting.
- Safety tags and warnings should be placed.
- Overload and under load protection.
- Auxiliary room, batter room, and control room must be separated.
- Frequent inspection of Thermal and Mechanical stress, moisture, dust.
- Use of reactors or current limiting impendences or underground neutrals to reduce fault levels.
- Use protective relays, circuit breakers and rated fuses to control the current and to isolate the faulty equipment speedily and automatically. Check before closing an OCB for high voltage lines.
- Use of grounding mat of low ohmic value and all non current-carrying parts to be connected to the grounding grid by duplicate earth and segregated non current carrying metallic parts to be electrically bonded.
- Record of ground resistance values and the physical condition of the grounding mat. Temperature sensitive alarm and protective relays to make alert and disconnect equipment before overheating.
- Interlocks to put into and out of service equipment correctly. Testing for high voltage, timing, polarity and insulation resistance.
- Cleaning and application of silicon grease to insulators to reduce pollution deposits.
- Safe cable trenches and preferably armored cables.
- Transformers with oil safety, D.O. fuse, L.T. fusc, MCB, MCCB and automatic fire protection system. Generators and motors with fire proof doors automatically actuated by fire detectors. 30.
- Ready CO₂ type and other fire extinguishers.
- Double communication systems with critical areas.
- Clear approach available for fire fighting
- Flame and shock detectors and central fire squad annunciation system for fire safety.
- Diesel pump set for required fire water pressure.
- Good housekeeping including well maintenance of all electrical installations.
- Adequate working space and means of access around each apparatus.
- First-aid boxes and respiratory equipment ready.
- Training for artificial respiration to save life from shock.
- Prevent higher humidity and temperature near electric installations. Work with full protection in raining.
- Use of flameproof/explosion proof equipment in flammable/explosive areas.
- Earthing and bonding of solvent carrying pipelines and equipment.
ELCB - Earth leakage circuit breaker
ELCB works before current reach at danger level it shut off circuit in milliseconds.
AC vs DC Power blog contains following questions
- What is AC power?
- What is DC power?
- What's the need for two different power types?
What is AC power?
Alternating current (AC) power is the standard electricity that comes out of power outlets and is defined as a flow of charge that exhibits a periodic change in direction.
AC's current flow changes between positive and negative because of electrons—electrical currents come from the flow of these electrons, which can move in either a positive (upward) or negative (downward) direction.
This is known as the sinusoidal AC wave, and this wave is caused when alternators at power plants create AC power.

Alternators create AC power by spinning a wire loop inside a magnetic field. Waves of alternating current are made when the wire moves into areas of different magnetic polarity
Example, the current changes direction when the wire spins from one of the magnetic field's poles to the other.
This wave-like motion means that AC power can travel farther than DC power, a huge advantage when it comes to delivering power to consumers via power outlets.
Direct current (DC) power, as you may suss from the name, is a linear electrical current—it moves in a straight line.

Direct current can come from multiple sources, including batteries, solar cells, fuel cells, and some modified alternators. DC power can also be "made" from AC power by using a rectifier that converts AC to DC.
DC power is far more consistent in terms of voltage delivery, meaning that most electronics rely on it and use DC power sources such as batteries.
Electronic devices can also convert AC power from outlets to DC power by using a rectifier, often built into a device's power supply.
A transformer will also be used to raise or lower the voltage to a level appropriate for the device in question.
Not all electrical devices use DC power, though. Many devices, household appliances, especially, such as lamps, washing machines, and refrigerators, all use AC power, which is delivered directly from the power grid via power outlets.
What's the need for two different power types?
Although many of today's electronics and electrical devices prefer DC power because of its smooth flow and even voltage, we could not get by without AC. Both types of power are essential; one is not "better" than the other.
In fact, AC dominates the electricity market; all power outlets bring power into buildings in the form of AC, even where the current may need to be immediately converted into DC power.
This is because DC is not capable of traveling the same long distances from power plants to buildings that AC is.
It is also a lot easier to generate AC than DC due to the way generators turn, and the system is on the whole cheaper to operate with AC, power can be hauled through national grids via miles and miles of wire and pylons easily.
DC primarily comes into play, where a device needs to store power in batteries for future use. Smartphones, laptops, portable generators, torches, outdoor CCTV camera systems you name it, anything battery-powered relies on storing DC power.
When batteries are charged from the mains supply, AC is converted to DC by a rectifier and stored in the battery.
This is not the only method of charging used, though. If you have ever charged your phone using a power bank, for example, you are using a DC power supply rather than an AC one.
In these situations, DC-DC power supplies may need to change the voltage of the output (in this case, the power bank) for the device's (in this case, the phone) use.
Variable Frequency Drive (VFD)
Other names for a VFD are variable speed drive, adjustable speed drive, adjustable frequency drive, AC drive, Microdrive, and inverter.
Frequency (or hertz) is directly related to the motor’s speed (RPMs). In other words, the faster the frequency, the faster the RPMs go.
If an application does not require an electric motor to run at full speed, the VFD can be used to ramp down the frequency and voltage to meet the requirements of the electric motor’s load.
As the application’s motor speed requirements change, the VFD can simply turn up or down the motor speed to meet the speed requirement.
The first stage of a Variable Frequency AC Drive, or VFD, is the Converter.
The converter is comprised of six diodes, which are similar to check valves used in plumbing systems.
They allow current to flow in only one direction; the direction shown by the arrow in the diode symbol.
whenever A-phase voltage (voltage is similar to pressure in plumbing systems) is more positive than B or C phase voltages, then that diode will open and allow current to flow.
When B-phase becomes more positive than A-phase, then the B-phase diode will open and the A-phase diode will close.
The same is true for the 3 diodes on the negative side of the bus. Thus, we get six current “pulses” as each diode opens and closes.
This is called a “six-pulse VFD”, which is the standard configuration for current Variable Frequency Drives.
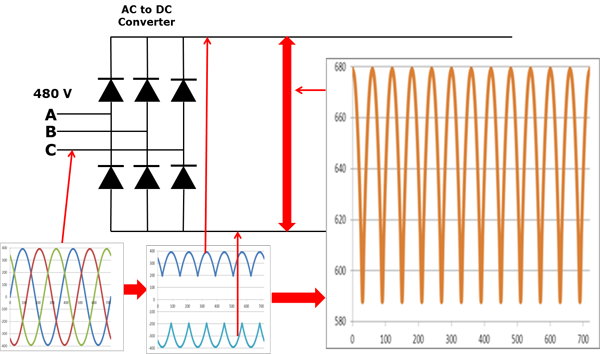
Let us assume that the drive is operating on a 480V power system. The 480V rating is “rms” or root-mean-squared.
The peaks on a 480V system are 679V. As you can see, the VFD dc bus has a dc voltage with an AC ripple. The voltage runs between approximately 580V and 680V.

We can get rid of the AC ripple on the DC bus by adding a capacitor. A capacitor operates in a similar fashion to a reservoir or accumulator in a plumbing system.
This capacitor absorbs the ac ripple and delivers a smooth dc voltage. The AC ripple on the DC bus is typically less than 3 Volts. Thus, the voltage on the DC bus becomes “approximately” 650VDC.
The actual voltage will depend on the voltage level of the AC line feeding the drive, the level of voltage unbalance on the power system, the motor load, the impedance of the power system, and any reactors or harmonic filters on the drive.
The diode bridge converter that converts AC-to-DC, is sometimes just referred to as a converter. The converter that converts the dc back to ac is also a converter, but to distinguish it from the diode converter, it is usually referred to as an “inverter”.
It has become common in the industry to refer to any DC-to-AC converter as an inverter.

Note that in a real VFD, the switches shown would actually be transistors.
When we close one of the top switches in the inverter, that phase of the motor is connected to the positive dc bus and the voltage on that phase becomes positive.
When we close one of the bottom switches in the converter, that phase is connected to the negative dc bus and becomes negative.
Thus, we can make any phase on the motor become positive or negative at will and can thus generate any frequency that we want. So, we can make any phase be positive, negative, or zero.

The blue sine-wave is shown for comparison purposes only. The drive does not generate this sine wave.
Notice that the output from the VFD is a “rectangular” wave form. VFD’s do not produce a sinusoidal output.
This rectangular waveform would not be a good choice for a general purpose distribution system, but is perfectly adequate for a motor.
If we want to reduce the motor frequency to 30 Hz, then we simply switch the inverter output transistors more slowly.
But, if we reduce the frequency to 30Hz, then we must also reduce the voltage to 240V in order to maintain the V/Hz ratio (see the VFD Motor Theory presentation for more on this). How are we going to reduce the voltage if the only voltage we have is 650VDC?
This is called Pulse Width Modulation or PWM. Imagine that we could control the pressure in a water line by turning the valve on and off at a high rate of speed.
While this would not be practical for plumbing systems, it works very well for VFD’s. Notice that during the first half cycle, the voltage is ON half the time and OFF half the time. Thus, the average voltage is half of 480V or 240V. By pulsing the output, we can achieve any average voltage on the output of the VFD.
See the Pictures below to understand what the different parts of a drive look like.


Why should we use a VFD?
1 - Reduce Energy Consumption and Energy Costs
2 - Increase Production Through Tighter Process Control
3 - Extend Equipment Life and Reduce Maintenance
Some motors are designed to operate at two, three, or four separate designated speeds. The speed of an induction motor depends on the number of poles built into the motor and the frequency of the electrical power supply.
Multi-speed motors are available up to 500 hp, and are very reliable, but have several drawbacks.

The stator slots have to be bigger than those of single-speed motors in order to accommodate two or more sets of windings.
As a result, the motors are bulkier and cannot be easily retrofitted. The current-carrying capacity of the copper is poorly utilized since only one set of windings is active at a time. Because of their dual speed design, however, they still have lower operating efficiencies than comparably sized single speed motors.
Multiple speed motor stator
Multiple speed motor starters typically cost up to twice as much as single-speed motor starters. Multi-speed motors themselves cost 50-100 percent more than single-speed motors.
Two-speed motors can be used to save energy in such applications as air volume control in facilities that have large differences in day-to-night or weekday-to-weekend air flow requirements.
A dual speed fan rated for 1,200 and 1,800 rpm, for instance, can reduce fan energy requirements at night and on weekends by 70 percent.
Pole-Amplitude Modulation (PAM) Motors
The pole amplitude modulation motor is a single-winding, two-speed, squirrel cage induction motor that avoids some of the drawbacks of conventional two-speed designs.
PAM motors are available in a more broad range of speed ratios than standard multi-speed motors, but these are all synchronous speed ratios. Since PAM motors require no additional windings, they are more compact than other multi-speed motors using the same frame size designations.
The low speed setting of a PAM motor functions well for soft-starting, producing lower inrush current and heating.
PAM Motors
PAM motors are especially well suited for two-speed duty cycle applications,including large fans and pumps, rating from a few to thousands of horsepower.
In retrofits, PAM motors allow for continued use of a pre-existing throttle device, such as a valve or damper, while eliminating the heavy losses normally associated with throttle-only controls.
Like multi-speed motors, PAM motors are available for variable-torque, constant-torque or constant-horsepower applications. PAM motors with starters cost about the same as standard multi-speed motors.
Common PAM motor speeds:
900/720 rpm
1,200/720 rpm
1,200/900 rpm
1,800/720 rpm
1,800/1,200 rpm
3,600/720 rpm
3,600/900 rpm
Static Electricity

Static Electricity blog contains
What Is Static Electricity?
Where do charges come from?
Insulators and conductors
Static Discharge
Grounding
A stationary electrical charge that is built up on the surface of a material







Static Discharge
How does a positively charged rod attract a neutral object?
Grounding
Ohm's Law
Ohm's law states that
"The current through a conductor between two points is directly proportional to the potential difference or voltage across the two points, and inversely proportional to the resistance between them".
Ohm's law can be expressed as
I = U / R (1)
where
I = current (ampere, A)
U = electrical potential (volts, V)
R = resistance (ohms, Ω)
Example - Ohm's law
A 12 volt battery supplies power to a resistance of 18 ohms. The current in the elctrical circuit can be calculated as
I = (12 volts) / (18 ohm)
= 0.67 ampere

Equivalent Expressions of Ohm's Law
Ohm's law (1) can also be expressed as
U = R I (2)
or
R = U / I (3)

Example - Electric Circuit Resistance
A current of 1 ampere is flowing through a 230 V electric circuit. From the diagram above this indicates resistance
R ≈ 220 Ω
This can alternatively be calculated with Ohm's law
R = (230 V) / (1 A)
= 230 Ω
Example - Ohm's Law and Multiples and Submultiples
Currents, voltages and resistances in electric circuits may often be very small or very large - so multiples and submultiples are often used.
The voltage required applied to a 3.3 kΩ resistor to generate a current of 20 mA can be calculated as
U = (3.3 kΩ) (1000 Ω/kΩ) (20 mA) (10-3 A/mA)
= 66 V
Electric Resistance Nomogram

The default values in the nomogram above indicates 230 volts, resistance 24 ohm and current 10 amps.
Power
Electric power can be expressed as
P = U I
= R I2
= U2 / R (4)
where
P = electrical power (watts, W)
Example - Power Consumed
The power consumed in the 12V electrical circuit above can be calculated as
P = (12 volts)2 / (18 ohm)
= 8 W
Example - Power and Electrical Resistance
A 100 W electric light bulb is connected to a 230 V supply. The current flowing can be calculated by reorganizing (4) to
I = P / U
= (100 W) / (230 V)
= 0.43 ampere
The resistance can be calculated by reorganizing (4) to
R = U2 / P
= (230 V)2 / (100 W)
= 529 Ω
Electric Power Nomogram
This nomogram can be used to estimate power vs. voltage and ampere.

Kirchhoff's Current Law
Also called Kirchhoff's first law, Kirchhoff's point rule, Kirchhoff's junction rule (or nodal rule) or Kirchhoff's first rule.

At any junction in an electric circuit the total current flowing towards the junction is equal to the total current flowing away from the junction.
Kirchhoff's Current Law can be expressed as
Σ I = I1 + I2 + .. + In = 0 (1)
where
I = currents (amps)
In general - current toward the junction is positive and current flowing away from the junction is negative.
Example - Kirchhoff's Current Law
The currents in the figure above is I1 = 0.1 A, I2 = 0.2 A, I3 = 0.1 A, I4 = - 0.05 A, I5 = -0.15 A.
I6 can be calculated by using Kirchhoff's current law
(0.1 A) + (0.2 A) + (0.1 A) + (- 0.05 A) + (-0.15 A) + I6 = 0
or
I6 = -((0.1 A) + (0.2 A) + (0.1 A) + (- 0.05 A) + (-0.15 A))
= -0.2 A
Kirchhoff's Voltage Law
Also called Kirchhoff's second law, Kirchhoff's loop (or mesh) rule, or Kirchhoff's second rule.
In a closed loop in a network the sum of the voltage drops or potential differences around the loop is zero.
Kirchhoff's Voltage Law can be expressed as
Σ U = U1 + U2 + .. + Un = 0 (2)
where
U = voltage drop or potential difference (volts)
In a schematic diagram voltage can be measured positive clockwise or anticlockwise.
Resistance and Conductance
The reciprocal of electrical resistance is conductance
The unit of electric resistance is ohm (Ω)
R = U / I (1)
where
R = resistance (ohm, Ω)
U = electrical potential (volts)
I = current flow (ampere)
The reciprocal of resistance is conductance
G = 1 / R (2)
where
G = conductance (siemens, S)
Example - Conductance
Conductance of a conductor with resistance 10 Ω can be calculated as
G = 1 / (10 Ω)
= 0.1 siemens, S
Star Delta Starter
A star delta starter is the most commonly used method for the starting of a 3 phase induction motor.
In star delta starting an induction motor is connected in through a star connection throughout the starting period. Then once the motor reaches the required speed, the motor is connected in through a delta connection.
A star delta starter will start a motor with a star connected stator winding. When motor reaches about 80% of its full load speed, it will begin to run in a delta connected stator winding.

A star delta starter is a type of reduced voltage starter. We use it to reduce the starting current of the motor without using any external device or apparatus.
This is a big advantage of a star delta starter, as it typically has around 1/3 of the inrush current compared to a DOL starter.
The starter mainly consists of a TPDP switch which stands for Tripple Pole Double Throw switch. This switch changes stator winding from star to delta.
During starting condition stator winding is connected in the form of a star. Now we shall see how a star delta starter reduces the starting current of a three-phase induction motor.
For that let us consider,
VL = Supply Line Voltage,
ILS = Supply Line Current and,
IPS = Winding Current per Phase and
Z = Impedance per phase winding at stand still condition.












Advantages of Star Delta Starter
The disadvantages of star delta starters include:
Essential Electronic Components and their Functions
What are the electronic components?
The following components are among the most common found in electronic devices:
- Microcontroller
- Transformer
- Battery
- Fuse
- Relays
- Switches
- Motors
- Circuit Breakers

What are electronic components used for?
Microcomputers are small computers used to control a multitude of devices, such as power tools, remote controls, medical equipment and office machines.
Batteries convert chemical energy to electrical energy. The two different cells of a battery are anode (+) and cathode (-).
Fuses help preserve components from overloading with excessive current. A fuse consists of connection body, support, contacts and metal-fuse material such as Zinc or copper. As a protective device, a circuit breaker can be controlled with a remote switch. It is designed to protect the circuit from overloading or a short circuit.
Switches interrupt current. The four types of switches are: single pole single throw (SPST), single pole double throw (SPDT), double pole single throw (DPST) and double pole double throw (DPDT).
Relays are electromechanical switches that shut power on or off. A relay includes an electromagnet, an armature, a series of electrical contacts, and a spring.
Motors convert electrical energy into mechanical energy. Key components include a rotor, stator, bearings, conduit box, enclosure, and eye bolt. From watches, to home entertainment equipment, to vehicles; motors can power a wide array of devices.
What are active and passive components in electronics?
Active components include transistors, while passive components include transformers, inductors, resistors, capacitors. Transformers are commonly used to step up or step down power.
A resistor restricts current flow. It is used in thermistors and potentiometers. Similar to a low capacity battery, a capacitor allows delays to occur in circuits. Inductors are used to control frequencies.
When building electronic circuits, you will work with a number of basic electronic components, including resistors, capacitors, diodes, transistors, inductors and integrated circuits. Below is a brief overview of the components and their functions.
Resistors
A resistor is one of the components you will come across in an integrated circuit. Like the name suggests, the device resists the flow of current.

Resistors are graded based on their power ratings (amount of power they can handle without exploding) and resistance values (capacity to resist current). The measurement is done in units know as ohms. The electronic symbol of the unit is O.
Capacitors:
These components can store electric charge temporarily. The components come in different varieties, with the most common ones being electrolytic and ceramic disk.

The capacity of a component is usually measured in microfarads (µF).
Diodes:
Diodes allow electric current to flow in a single direction only. Each diode has two terminals known as the anode and cathode.

When the anode is charged with positive voltage and the cathode with a negative one, electric current can flow. Reversing these voltages will prevent the current from flowing.
Transistors:
These components are easy to identify through their three terminals. For the components to work, voltage has to be applied to one of them; the base terminal.

The base can then control current flow in the two other terminals (the emitter and collector).
Inductors:
These are passive components that store energy in form of a magnetic field. An inductor simply consists of a coil of wire wound around some kind of core.

The core could be a magnet or air. When current passes through the inductor, a magnetic field is created around it. The magnetic field is stronger if a magnet is used as the core.
Integrated Circuits:
An integrated circuit refers to a special device that has all the components required in an electronic circuit.
The component has diodes, transistors, and other devices, all of which are etched on a tiny piece of silicon. The components are used in many electronic devices, including watches and computers.
Microcontrollers:
Microcontrollers are small computers used to control a multitude of devices, such as power tools, remote controls, medical equipment and office machines.
Transformers:
Built with two coils of wire, transformers are commonly used to step up or step down power.
Batteries:
Batteries convert chemical energy to electrical energy. The two different cells of a battery are anode (+) and cathode (-).
Fuses:
Fuses help preserve components from overloading with excessive current. A fuse consists of connection body, support, contacts, and metal-fuse material such as zinc or copper.
Relays:
These electromechanical switches shut power on or off. A relay includes an electromagnet, an armature, a series of electrical contacts and a spring.
Switches:
Switches interrupt current. The four types of switches are: single pole single throw (SPST), single pole double throw (SPDT), double pole single throw (DPST), and double pole double throw (DPDT).
Motors:
Motors convert electrical energy into mechanical energy. Key components include a rotor, stator, bearings, conduit box, enclosure, and eye bolt.
Circuit Breakers:
As a protective device, a circuit breaker can be controlled with a remote switch. It is designed to protect the circuit from overloading or a short circuit.
Electrical interview Questions
1. What is electric current? (Units coulomb per second or Ampere)
2. What is Resistance? (Units of resistance) (Ohm definition)
3. Laws of resistance (Resistivity, specific resistance)
4. What electrical value can be measured across the copper and zinc rods?
5. What is alternating current (AC)?
6. What is Direct Current (DC)?
7. What does a fuse protect against in a circuit?
8. What unit is used to measure an electrical resistance?
9. What are the major parts of an electrical motor?
1. What is electric current?(units coulomb per second or Ampere)
The controlled movement or drift of electrons through a substance is called the electric current.
Current may also be defined as the rate of net motion of an electric charge across a cross sectional boundary(as shown in fig).
= dQ/dt
Coulomb is the practical as well as SI unit for measurement of electric charge charge. One coulomb is approximately equal to 624 x 10^16 electrons.
Since current is the rate of flow of electron through the conductor and coulomb is the unit of electric charge, the current may be specified in coulombs per second.
See the Below video tutorial for More details:
2. What is Resistance ? (units of resistance) (ohm definition)
Resistance may be defined as that property of a substance which opposes (or restricts) the flow of an electric current (or electrons) through it.
Units and ohm definition
The practical as well as mks (or SI) unit of resistance is ohm (Ω), which is defined as that resistance between two points of a conductor when a potential difference of one volt, applied between these points, produces in this conductor a current of one ampere, the conductor not being a source of any emf.
For insulators having high resistance , much bigger units kilo ohm or kΩ (10^3 ohm) are used. in case of very small resistances smaller units like milli ohm (10^-3) are employed.
Relation Between electric conductivity and resistance :
Electric Conductivity and Resistance are inversely proportional to each other. the reciprocal of resistance is called conductance.
Conductance = 1/R
For More Detailed Explanation see the below video.
Ohm's Law and It's limitations
The current flowing through the conductor is directly proportional to the voltage difference across the ends of the conductor and inversely proportional to the resistance.
If 'I'current flowing through the conductor of resistance 'R' across which potential difference 'V' is applied then according to Ohm's law

Ohm's Law cannot be applied to circuits consisting of electronic tubes or transistors because such elements are not bilateral i.e they behave in different way when the direction of flow of current reversed as in case of diode.
Ohm's law also cannot be applied to circuits consisting of nonlinear elements like powdered carbon, thyrite, electric arc etc.
For More Explanation see the below video:
3. Laws of resistance (Resistivity ,specific resistance)
The resistance of a wire depends upon its length, area of cross section, type of material,purity and hardness of material of which it is made of and the operating temperature.
Resistance of a wire is
Directly proportional to its length, l i.e R α l
Inversely proportional to its area of cross section, a i.e Rα 1/a
Combining above two facts we have R α l/a

where ρ is a constant depending upon the nature of the material and is known as the specific resistance or resistivity of teh amterial of the wire.
Resistivity or specific resistance of amaterial may also be defined as the resistance of the material of unit length and unit cross section area.
Specific resistance or resistivity of a material may also defined as the resistance of the material may also defined as the resistance between opposite faces of a unit cube of that material.
Resistivity is measured in ohm-metres Ω-m or ohms per meter cube
For More Details about Ohm's Law See the Video